El Cummins 3062322 es el procesador analógico de señales que actúa como el “cerebro” del sistema de control de velocidad de lazo cerrado (Closed-Loop). Diseñado para motores de alta potencia y respuesta rápida, este gobernador electrónico es responsable de mantener la frecuencia eléctrica ($50/60\text{ Hz}$) con una precisión quirúrgica, compensando variaciones de carga en milisegundos mediante algoritmos PID (Proporcional, Integral y Derivativo).
1. Arquitectura de Control y Lógica PID
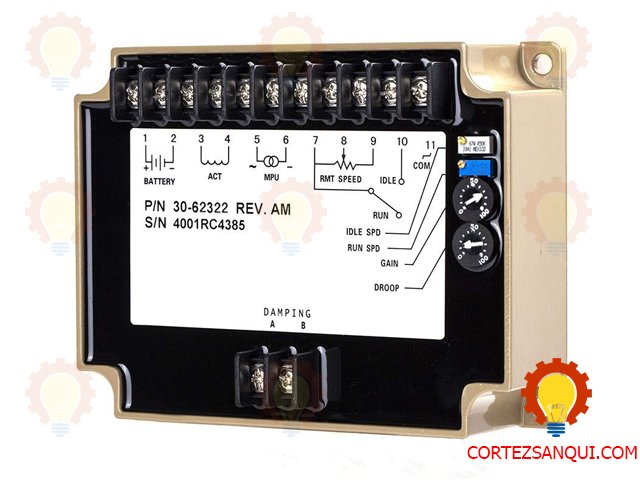
El 3062322 opera transformando la señal de frecuencia del MPU (Magnetic Pick-Up) en un voltaje de control para el actuador. Su superioridad técnica reside en la capacidad de ajuste de sus tres constantes de control:
Ganancia (Proporcional): Determina la sensibilidad de respuesta ante un error de velocidad. Un valor muy alto provoca una respuesta agresiva pero inestable; un valor muy bajo genera una respuesta “perezosa”.
Estabilidad (Integral/Derivativo): El control integral elimina el error de estado estacionario, asegurando que la frecuencia regrese exactamente a su valor nominal tras un impacto de carga. El control derivativo anticipa la tendencia del cambio de velocidad para amortiguar la respuesta.
Funcionamiento Isócrono: A diferencia de los gobernadores mecánicos que tienen una caída de velocidad (droop), el 3062322 permite una operación isócrona ($\pm 0.25\%$ de variación), ideal para centros de datos y equipos de telecomunicaciones.
2. Especificaciones Técnicas de Alto Nivel
Parámetro
Especificación
Estabilidad de Velocidad
Mejor que pm 0.25
Rango de Frecuencia MPU
1,000Hz a 7,500 Hz
Voltaje de Operación
12V o 24 V DC (Rango de 12 a 32 V)
Corriente de Salida (Actuador)
Máximo 5A continuos
Señal de Entrada MPU
0.5 a 120V RMS
3. Instalación Crítica: El Sensor MPU y el Actuador
Para que el 3062322 funcione con precisión, la infraestructura de señales debe ser impecable:
El Cálculo de Frecuencia
El controlador “entiende” las RPM del motor a través de la fórmula:
$$f = \frac{N \times Z60
Donde:
$f$ = Frecuencia en Hz enviada al controlador.
$N$ = Revoluciones por minuto (RPM) del motor.
$Z$ = Número de dientes de la cremallera del volante (Flywheel).
Recomendación de Instalación: El sensor MPU debe estar roscado hasta tocar un diente del volante y luego retroceder 3/4 de vuelta ($0.025″ – 0.035″$). Si la distancia es excesiva, la señal será débil y el controlador provocará un corte por pérdida de señal.
Blindaje (Shielding)
La señal del MPU es de bajo voltaje y alta frecuencia. Es obligatorio utilizar cable de par trenzado apantallado. El blindaje debe conectarse a tierra únicamente en el extremo del controlador para evitar bucles de tierra que inyecten ruido electromagnético en el lazo PID.
4. Protocolo de Calibración Dinámica (Tuning)
Calibrar un 3062322 es un proceso que requiere precisión para evitar el “hunting” (oscilación de velocidad).
Ajuste de Velocidad Nominal (Speed): Con el motor a temperatura de operación, ajuste el potenciómetro de Speed hasta alcanzar las $1800\text{ RPM}$ ($60\text{ Hz}$).
Optimización de Ganancia (Gain): Aumente la ganancia en sentido horario hasta que el motor empiece a oscilar levemente. En ese punto, retroceda un poco hasta que la velocidad se estabilice.
Ajuste de Estabilidad (Stability): Aplique una carga súbita al generador. Si la velocidad tarda mucho en recuperarse, aumente la estabilidad. Si el motor oscila demasiado después del impacto, reduzca la estabilidad.
Velocidad de Ralentí (IDLE): Permite configurar una velocidad baja de precalentamiento. Útil para proteger los cojinetes del turbo antes de subir a velocidad nominal.
5. Resolución de Problemas (Troubleshooting) de Especialista
El actuador se va a máxima apertura al encender: Indica un posible cortocircuito en el cableado del actuador o que el MPU no está enviando señal (el controlador “piensa” que el motor está detenido e intenta compensar).
Inestabilidad (Hunting) constante: Generalmente es un exceso de Ganancia o un MPU sucio con limaduras metálicas. Limpie la punta magnética del sensor.
El motor no alcanza la velocidad: Verifique que el voltaje de la batería no caiga por debajo de $10\text{ V}$ durante el arranque. Si el voltaje es bajo, el microprocesador del 3062322 se reinicia o funciona de manera errática.