Procesador ARM‑32 bits con alta integración y confiabilidad avanzada
Pantalla TFT‑LCD 4.3″ (480×272), multitáctil, con interfaz multilingüe (inglés, chino y más)
Conectividad CAN J1939 para monitorización/control de ECU (temperatura, presión, velocidad, consumo de combustible)
Comunicación RS‑485 + USB con protocolo Modbus, permite configuración y monitoreo remoto
Función SMS/GSM para envío automático de alertas y control remoto desde teléfonos (hasta 5 números)
Inicio/parada automático o manual, con protección ante fallas: alta temperatura, baja presión de aceite, sobre‑velocidad, etc.
Programación de arranque diario/semanal/mensual, registro de eventos y reloj en tiempo real (RTC)
Descargas
El SmartGen HGM 9310 CAN no es simplemente un controlador; es el cerebro de un sistema de energía. Diseñado para la automatización de unidades individuales y sistemas de transferencia automática (AMF), este controlador destaca por su pantalla LCD de 4.3 pulgadas y su capacidad de comunicación mediante puerto CANbus (J1939).
El HGM 9310 CAN integra técnicas digitales, inteligentes y de red. Su microprocesador de 32 bits permite una respuesta rápida y un cálculo preciso de los valores RMS (Root Mean Square), lo cual es crítico cuando se trabaja con cargas no lineales que distorsionan la onda senoidal.
Pantalla: LCD de 480×272 píxeles con retroiluminación.
Idiomas: Multilenguaje (incluyendo Español, Inglés, Chino, Ruso, etc.).
Puerto CANbus: Permite la conexión directa con la ECU de motores electrónicos (Cummins, Perkins, Scania, Volvo, etc.).
Comunicación: RS485 para monitoreo remoto y Modbus RTU.
| Parámetro | Rango / Valor |
| Voltaje de Operación | DC 8.0V a 35.0V (Continuo) |
| Consumo de Energía | < 5W (Standby < 2W) |
| Entrada de Voltaje AC | 15V – 360V AC (Fase-Neutro) |
| Frecuencia Alternador | 50/60 Hz |
| Corriente de CT | 5A (Nominal) |
| Rango de Temperatura | -25°C a +70°C |
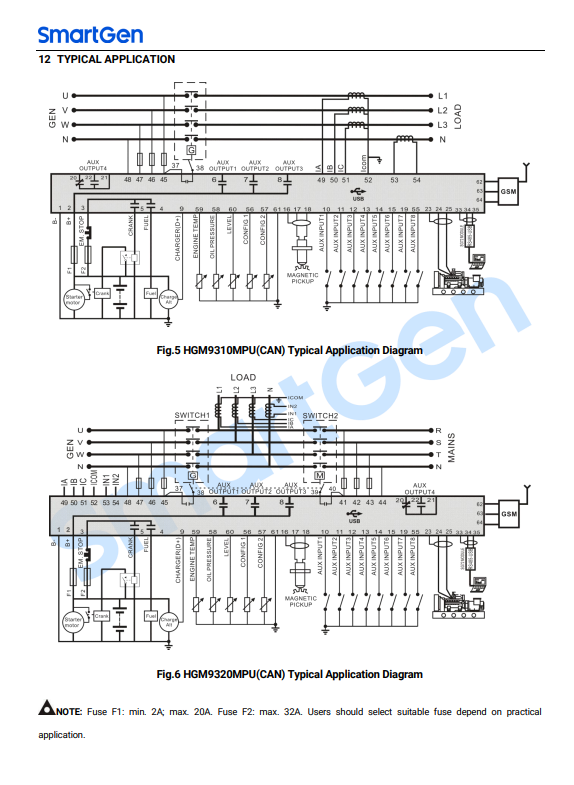
La instalación correcta es la base de la fiabilidad. Un error en el aterrizaje de los sensores o una mala sección de cable en los transformadores de corriente (CT) puede generar lecturas erróneas o incluso dañar el controlador.
El controlador está diseñado para montaje en panel frontal mediante clips de fijación.
Corte del Panel: Asegúrese de que el recorte sea de las dimensiones exactas indicadas en el manual (generalmente 214mm x 160mm).
Sellado: Utilice el empaque de goma suministrado para mantener el grado de protección IP65 en el frente.
Terminal 1 (B-): Conectar directamente al negativo de la batería. No use el chasis del generador como retorno si hay mucha distancia.
Terminal 2 (B+): Conectar al positivo de la batería a través de un fusible de 5A.
Terminal 3 (Entrada de Emergencia): Debe recibir B+ para que el controlador opere.
El HGM 9310 monitorea tanto la Red Eléctrica (Mains) como el Generador.
Utilice cables con aislamiento mínimo de 600V.
Es obligatorio el uso de fusibles de protección (1A a 2A) en las líneas de sensado de voltaje para evitar cortocircuitos catastróficos.
Polaridad: La cara “P1” del CT debe mirar hacia la fuente (el generador) y “P2” hacia la carga.
Conexión: S1 y S2 deben conectarse a los terminales correspondientes. Importante: Nunca deje un CT en circuito abierto mientras el generador está en funcionamiento, ya que generará voltajes peligrosos.
Una de las mayores ventajas del modelo CAN es su capacidad de hablar con la ECU del motor. Esto elimina la necesidad de instalar sensores físicos analógicos para presión de aceite y temperatura, ya que la ECU envía estos datos digitalmente.
Selección del Motor: En el menú de configuración, busque “Engine Type”. El SmartGen soporta protocolos estándar J1939 y perfiles específicos de fabricantes.
Velocidad de Comunicación: Asegúrese de que el controlador esté configurado a 250kbps (estándar J1939).
Cableado: Use cable de par trenzado blindado para CAN_H y CAN_L. Conecte una resistencia de terminación de 120Ω si el controlador es el último nodo de la red.
El HGM 9310 tiene cuatro modos principales accesibles desde el panel frontal:
Modo Manual: El operador controla el arranque y la parada mediante los botones verde (Start) y rojo (Stop). No hay transferencia automática de carga a menos que se presione manualmente el botón de transferencia.
Modo Automático: El controlador monitorea la entrada de red (Mains). Si el voltaje de red sale de los límites configurados, el controlador inicia la secuencia de arranque, calienta el motor y transfiere la carga.
Modo de Prueba (Test): El generador arranca con o sin carga (según configuración) para verificar su estado operativo.
Modo Parada (Stop): El motor se detiene y el controlador queda en espera. Si hay una alarma activa, este modo permite resetearla una vez corregida la falla.
A continuación, se detallan los fallos más comunes y cómo diagnosticarlos:
Causa: Voltaje de batería bajo o fusible fundido.
Solución: Mida el voltaje en los terminales 1 y 2. Debe ser >8V DC. Revise la continuidad del fusible de alimentación.
Causa: Falta de combustible, aire en el sistema de inyección o sensor de velocidad (Pickup) descalibrado.
Solución: Verifique si sale humo por el escape (indica que hay combustible pero no combustión). Revise la frecuencia en la pantalla durante el arranque; si marca 0Hz, el controlador no “siente” que el motor gira y cortará la marcha.
Causa: Nivel de aceite bajo, sensor defectuoso o cableado a tierra.
Solución: Si usa sensores analógicos, verifique que la curva de resistencia (VDO, Datcon, Murphy) coincida con la configuración del controlador. Si usa CANbus, verifique los códigos de error (DTC) enviados por la ECU.
Causa: Carga excesiva o cortocircuito en la línea.
Solución: Revise la relación de transformación de los CT configurada en el menú. Si el CT es 200/5, el controlador debe tener configurado “200” en el parámetro CT Rate.
Uso de Salidas Programables: El HGM 9310 tiene salidas digitales que pueden configurarse para funciones especiales como “Control de Bomba de Combustible”, “Precalentamiento” o “Alarma Común”.
Protección de la Batería: Configure el parámetro de “Voltaje Bajo de Batería” para recibir una alerta antes de que el generador no pueda arrancar por falta de energía.
Registro de Eventos: El controlador almacena hasta 99 eventos. Siempre revise el histórico después de una falla para entender qué ocurrió milisegundos antes del apagado.
Modbus y Monitoreo Remoto: Si conecta el puerto RS485 a un gateway industrial, puede monitorear el generador desde su celular. El ID de esclavo por defecto es 1 y la velocidad 9600 bps.
Antes de entregar el equipo al cliente final, realice estas pruebas:
Simulación de Fallo de Red: Corte los fusibles de sensado de red y observe si el generador arranca en el tiempo programado.
Prueba de Parada de Emergencia: Presione el hongo de emergencia; el motor debe detenerse inmediatamente sin pasar por el tiempo de enfriamiento.
Verificación de Lecturas: Compare las lecturas de voltaje y corriente de la pantalla con las de un multímetro/pinza amperimétrica calibrada.
Aunque el controlador es de estado sólido, requiere:
Limpieza de polvo acumulado en los terminales traseros (evita arcos eléctricos).
Verificación de la firmeza de los tornillos de conexión, ya que la vibración del generador puede aflojarlos con el tiempo.
Actualización de firmware si el fabricante SmartGen lanza mejoras de estabilidad o nuevos protocolos CAN.
Chatea con nosotros